気がつくとこのシリーズ20回目の記事です。よくもまぁここまで続けられるものだと我ながらあきれてしまいます。Shayの解析のあたりからは個人的興味で続けているところがありますので、万人にアピールする内容ではないと思いますが、よろしければ引き続きおつきあいください。今回からの考察では、別の概念を導入しますので少々難度が上がるかと思いますが、三角関数とベクトルの考え方がわかれば、理解できる内容になっているとは思います。
下の図は、2つのユニバーサルジョイントをつなげたときの解析で使ったものです。
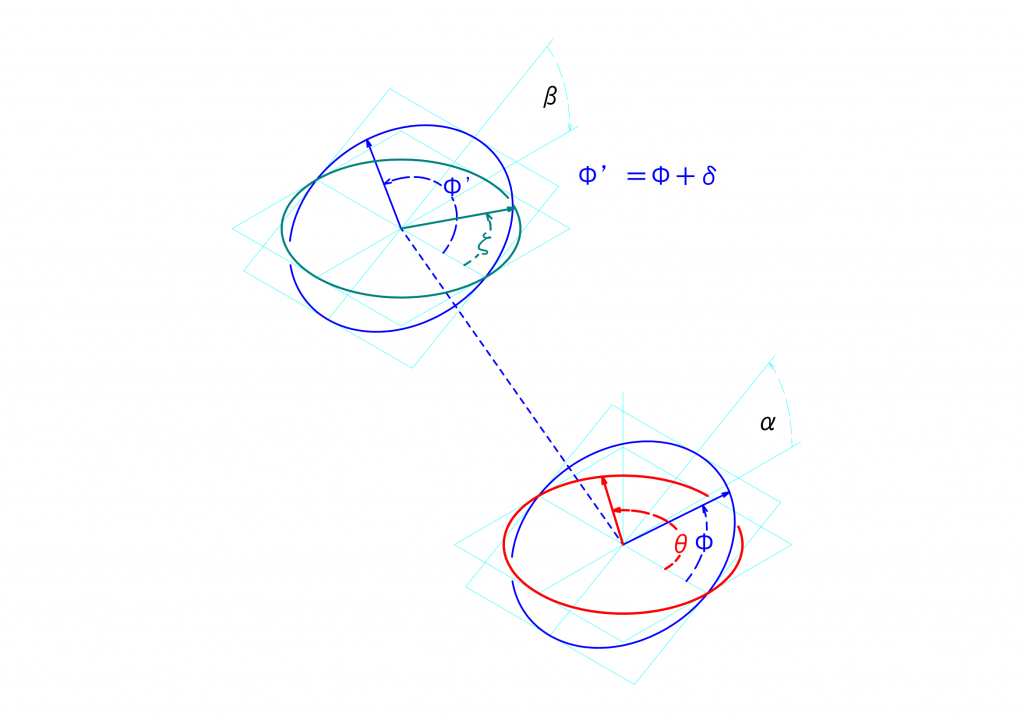
簡単におさらいしておくと、駆動面上の基準点がどれだけ回転したかの角度\(\theta\)と駆動面に対して\(\alpha\)傾いた伝達面上の基準点がどれだけ回転したかの角度\(\varphi\)に関して、
\(tan(\varphi) = -\frac{1}{tan(\theta)}\cdot\frac{1}{cos(\alpha)}\)
が成立し、中継面上の基準点が回転した角度\(\varphi'\)と中継面に対して\(\beta\)傾いた最終伝達面上の基準点が回転した角度\(\xi\)に関して、
\(tan(\xi) = -\frac{1}{tan(\varphi')}\cdot\frac{1}{cos(\beta)}\)
が成立します。
ここで、
\(\varphi'=\varphi + \delta\)
であり、\(\delta\)は伝達面に対する中継面の回転の位相のずれを表します。
ユニバーサルジョイントの角速度の変動を解析するには、\(\alpha\)、\(\beta\)を求め、\(\delta\)を定め、上記の関係から導出できる式にあてはめて計算してきました。
さて、ここまでの議論では一貫して一つの仮定を置いています。2つのユニバーサルジョイントを組み合わせたときに、ユニバーサルジョイントを構成する3つの軸がすべて同一平面上にある、というものです。
しかしながら、Shayの中には、エンジンのクランクシャフトの高さとベベルギアを駆動する台車の軸とが異なっているように見えるものがあります。写真の写し方によるのかとも思いましたが、このShayの図面を子細に確認すると、クランクシャフトの軸の高さはベベルギアを駆動する軸より1.5インチ高い位置にあるように読み取れます。
また、模型の中でも、モーターの軸の高さと、車輪を駆動する軸の高さがあっていないものを見たことがあります。
このような動力機構が曲線をを通過する場合、ユニバーサルジョイントを構成する3つの軸が同一平面上には存在するという仮定を満たしませんので、これまでの考え方では解析できません。以降、ユニバーサルジョイントを構成する3つの軸が同一平面上には存在しない場合の解析を考察します。
以下の説明をわかりやすくするために、先ほどの図と等価の図を図を座標系を明示して描いてみます。
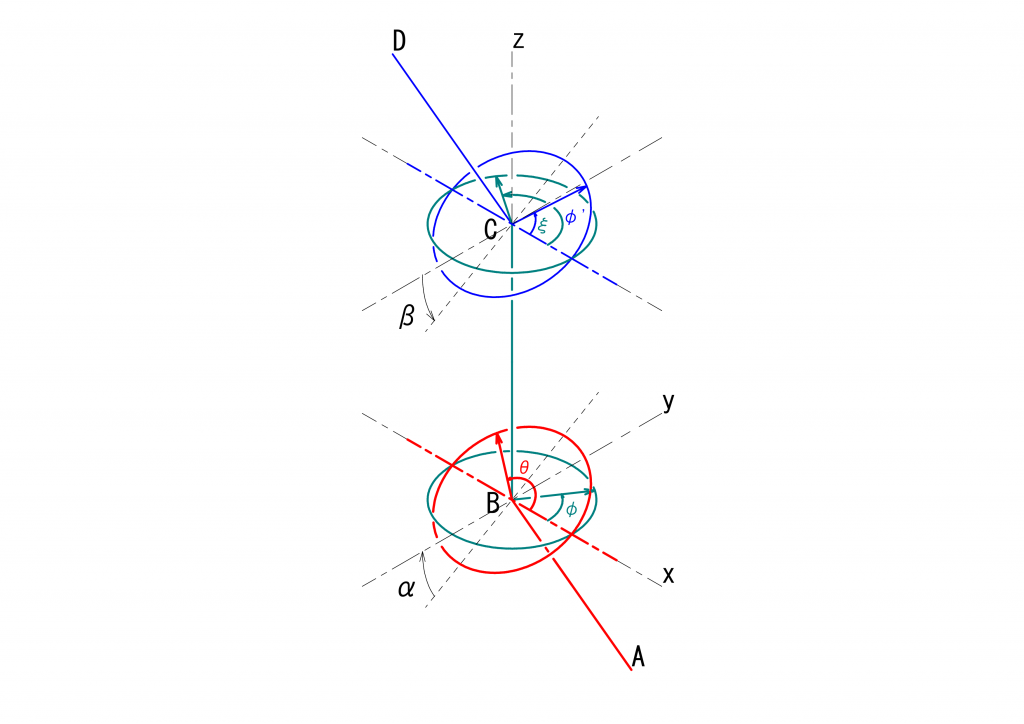
この図では、ユニバーサルジョイントを構成する3つの軸、\(AB\)、\(BC\)、\(CD\)、が\(y\)軸と\(z\)軸とからなる平面に配置されるように座標系を設定しています。同一平面上にあるということは、3つの軸を規定する4つの点\(A\)、\(B\)、\(C\)、\(D\)の\(x\)座標の値が\(0\)になるということです。ユニバーサルジョイントを構成する3つの軸が同一平面上にある場合、4つの点の\(x\)座標の値が\(0\)になるような座標系を設定することが可能である、という表現がより正確かもしれません。
解析に用いる\(\theta\)、\(\varphi\)、\(\varphi'\)、\(\xi\)を、どこを基準にして測るか、を考えてみます。\(\theta\)と\(\varphi\)を測る基準となるのは、駆動面と伝達面との2つの平面が交差する直線で、上図の赤の一点鎖線となります。同様に、\(\varphi'\)と\(\xi\)とを測る基準となるのは、中継面と最終伝達面との2つの平面が交差する直線で、上図の青の一点鎖線となります。3つの軸が同一平面上にある場合、これら2つの基準となる直線は平行となります。したがって、これらの4つの角度は、上記の図の例では\(x\)軸を基準に角度を測ればよい、ということになります。
3つの軸が同一平面にない場合の一例を示します。ここでは、先ほどの絵で\(A\)、\(B\)、\(C\)の位置は変わらず、\(CD\)が\(z\)軸周りに\(\eta\)回転したという様子を示しています。
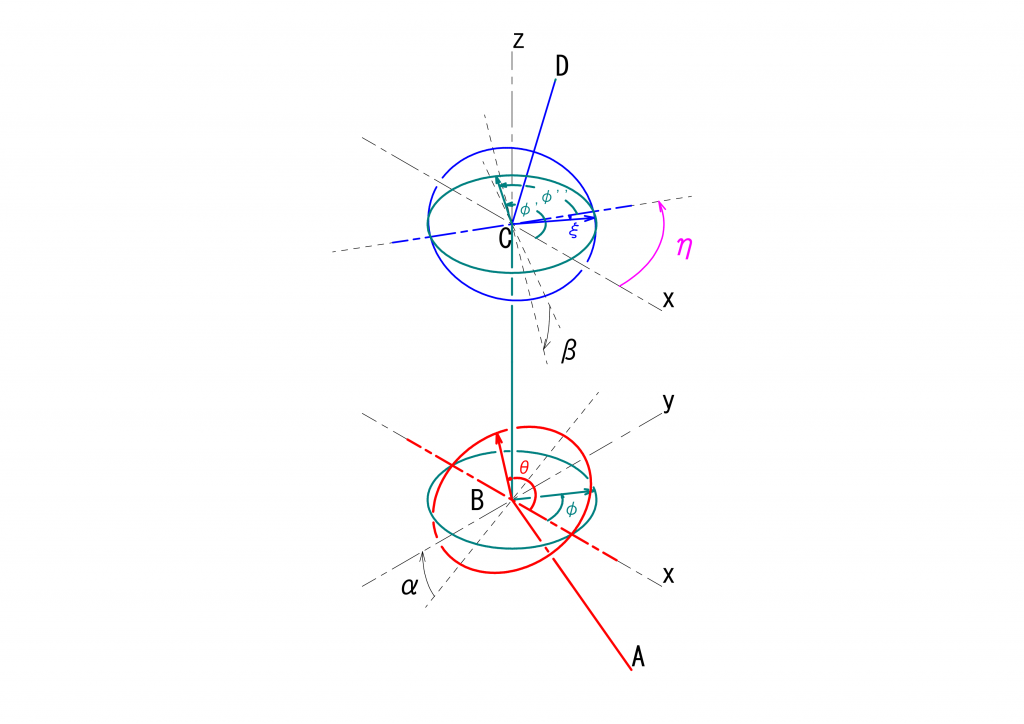
図を見ればわかる通り、駆動面と伝達面との2つの平面が交差する直線と、中継面と最終伝達面との2つの平面が交差する直線とは平行とはなりません。駆動面と伝達面との2つの平面が交差する赤い一点鎖線で示した直線に対する\(\theta\)と\(\varphi\)を測り、中継面と最終伝達面との2つの平面が交差する青い一点鎖線で示した直線に対する\(\varphi'’\)と\(\xi\)とを測り、これらの角度の間に成り立つ関係を求めなければなりません。
ここで、駆動面と伝達面との関係は前の場合と同じで、
\(tan(\varphi) = -\frac{1}{tan(\theta)}\cdot\frac{1}{cos(\alpha)}\)
が成立します。
中継面と最終伝達面との関係は、
\(tan(\xi) = -\frac{1}{tan(\varphi'’)}\cdot\frac{1}{cos(\beta)}\)
が成立します。
\(CD\)が\(z\)軸を中心として\(\eta\)だけ回転したことを考慮する必要があり、
\(\varphi'' = \varphi ’-\eta = \varphi + \delta - \eta\)
となります。\(\varphi'\)が\(\varphi\)に対してどれだけ位相がずれているかを\(\delta\)が表すのは今まで通りです。従って、これまで導出してきた角度や角速度の式の\(\delta\)を\(\delta-\eta\)で読み替えれば、そのまま利用することができます。
結論として、3つの軸が同一平面に存在しない場合にユニバーサルジョイントの角速度の変動を求めるには、\(\alpha\)、\(\beta\)、\(\eta\)を求めればよく、次回以降その具体的な求め方を考察してゆきます。